
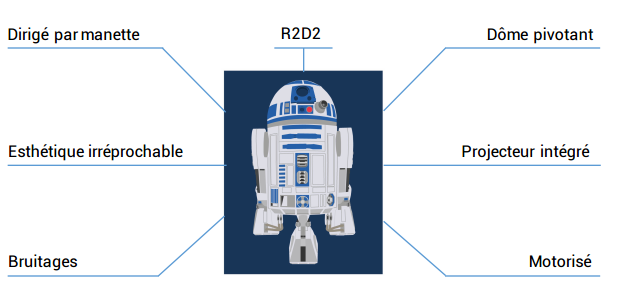
Présentation
Il y a bien longtemps, dans une galaxie lointaine, très lointaine, une équipe avait un projet. Réaliser une réplique grandeur nature du fameux R2D2, emblématique robot de la saga Star-Wars. Ce projet allie programmation,
mécanique, électronique et modélisme. C’est un projet ambitieux qui nous permettra d’acquérir des connaissances dans différents domaines.
Un enjeu
Présentation du robot lors de salons étudiants et des journées portes ouvertes de notre école.
Nos objectifs pour ce projet
Article fait par Florian Peyrichout
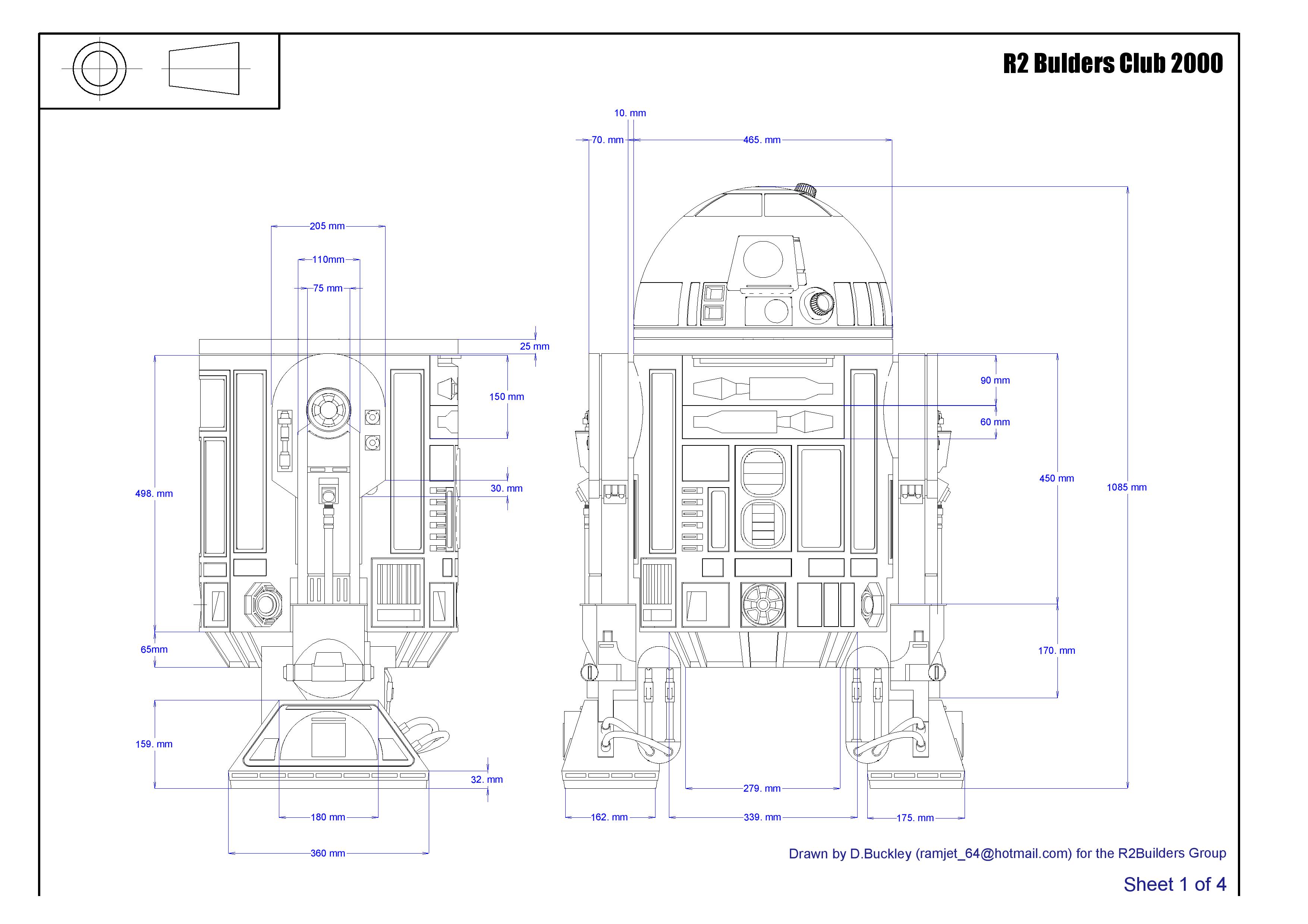
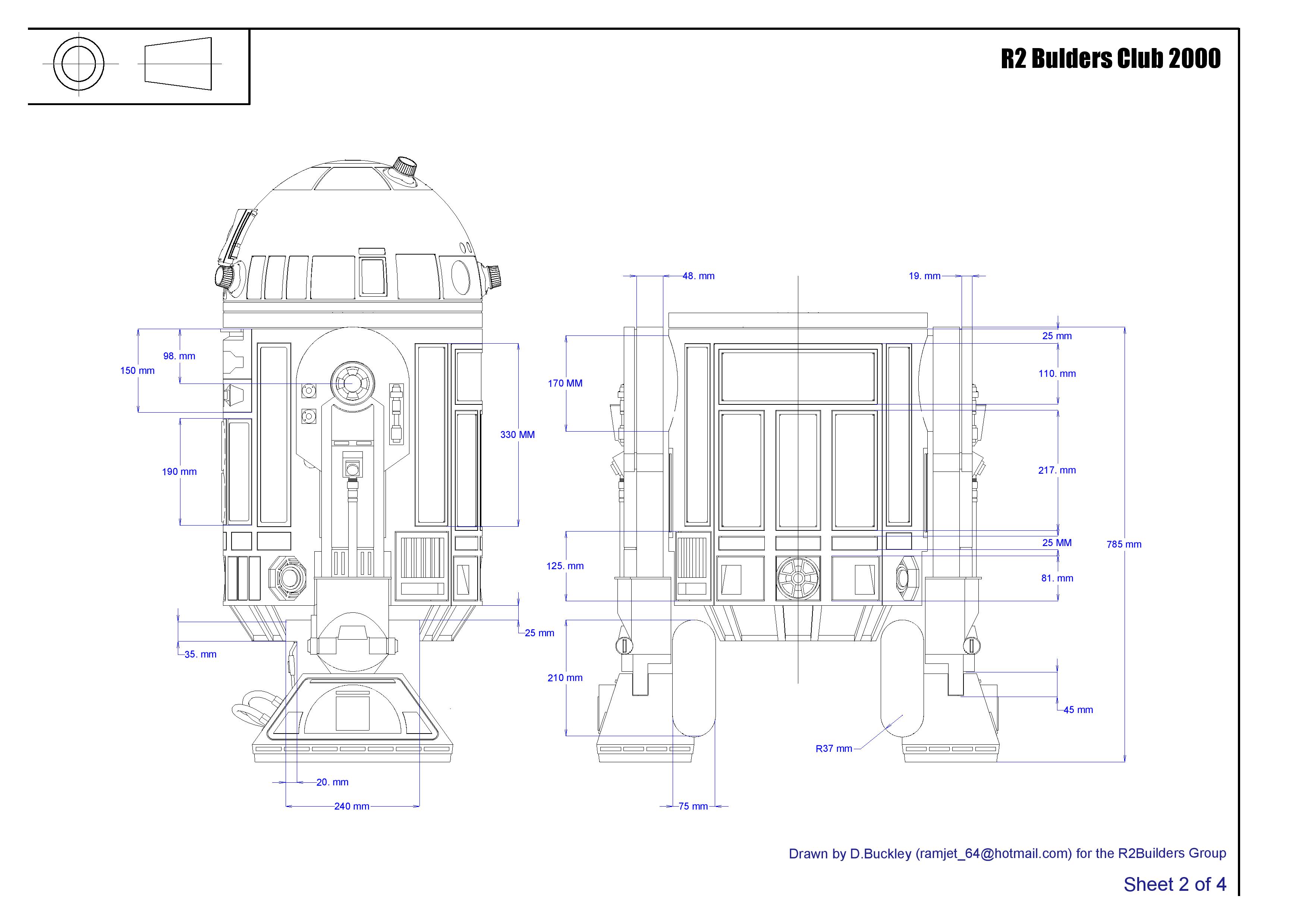
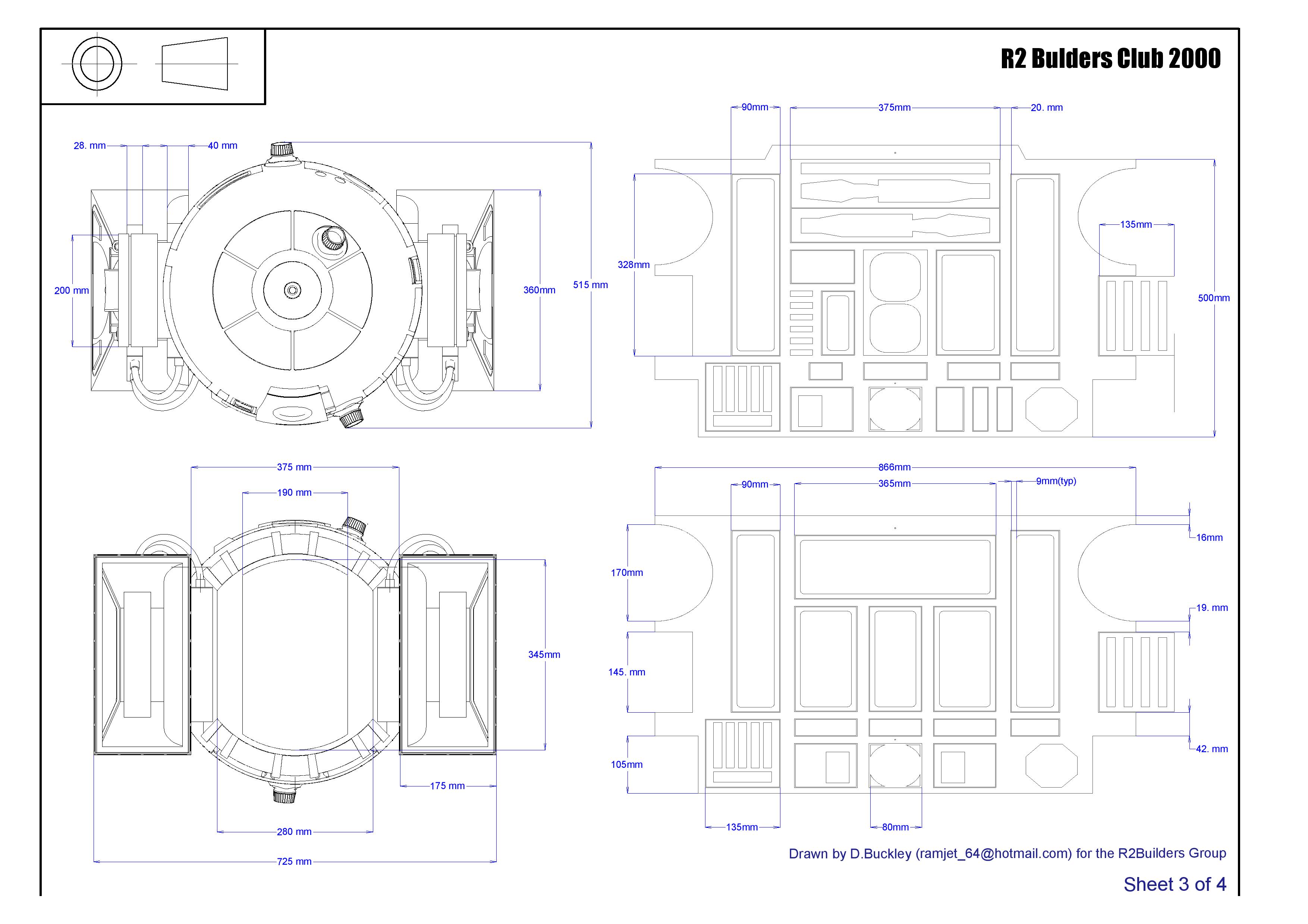
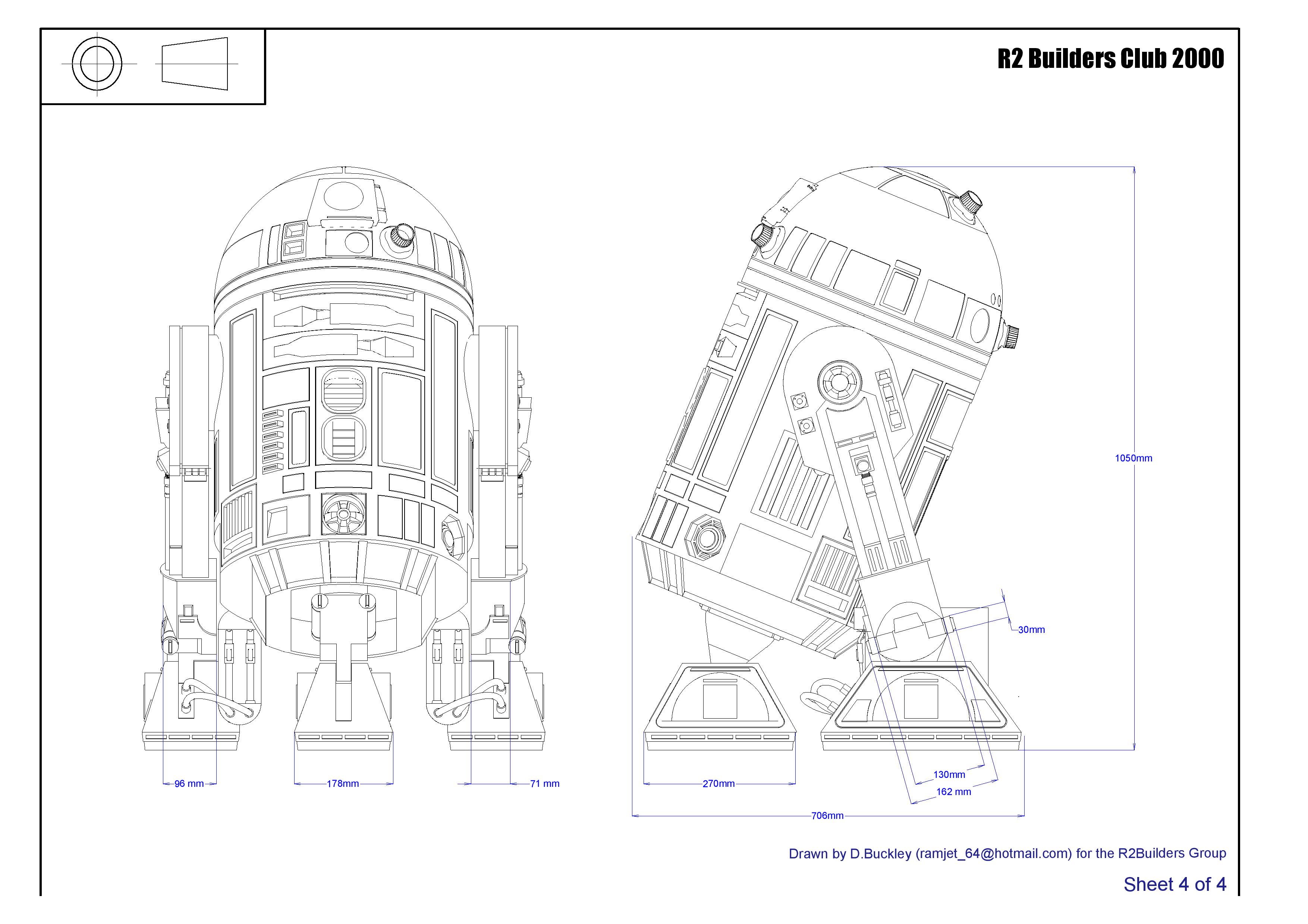
R2D2 Mécanique 1
Première année (2017-2018) :
Introduction :
Lors de mon arrivée dans l'association robotique de mon école ROBOTIUM, on m'a présenté le projet "phare" de cette
association qui était le R2D2. Ce n'était qu'une ébauche d'un projet à vrai dire, 4 équipes de 3 personnes avaient décidé de s'en occuper, mes deux camarades
et moi avions choisi de nous occuper de la motorisation des pieds. Néanmoins vu l'état initial du produit nous avions beaucoup à faire.
Il a donc fallu dans un premier temps réaliser
un cahier des charges pour connaître tous les besoins et les performances exigées mais aussi connaître les limites et les contraintes à respecter. Il fallait donc réussir à
piloter un robot d'environ 40 kg sur 3 pieds dont 2 motorisés sans qu'il n'y ait de défaut d'équilibre ou de puissance et pouvant monter des pentes maximales de 10°. Tout cela avec un
budget très restreint d'environ 90 euros maximum.
Le réel dilemme était le mécanisme entre les jambes et les pieds, fallait-il mettre un axe afin d'éviter une rigidité lors d'une éventuelle pente ou opter pour un encastrement
qui risquait lui, de raidir le robot lors d'un passage compliqué et donc une cassure.
Avant toute conception ou plan il fallait d'abord connaître les caractéristiques et les dimensions
de nos moteurs. Pour cela nous avons choisi un moto-réducteur 1 :15 assez puissant avec un bon couple.
Mécanique :
Maintenant que nous avions choisi notre moteur, il était temps
de réaliser les plans pour réaliser les pieds. Les jambes, elles, étaient déjà réalisées depuis quelques années néanmoins en polystyrène
et en bois. Pour réaliser nos pieds nous avons choisi le moyen le moins coûteux, nous avons réalisé nos pieds sous SolidWorks puis créer l'image 3D.
Nous avons pu ensuite
imprimer ces images 3D grâce à notre imprimante 3D, néanmoins elle ne permet pas d'excéder des impressions de plus de 30cm de long, cela nous a donc obliger à imprimer les pieds
motorisés en 2 parties. De plus nous avons aussi conçu de la même manière les cylindres et les autres gadgets décoratifs. Cependant nos impressions n'ont pas été
très concluantes, nous avons aperçu beaucoup de ratés sur nos pièces, des défauts qui n'auraient pas pu passer inaperçu. Pour cela, j'ai utilisé de l'enduit puis
poncé à multiples reprises afin de reboucher et reconsolider certaines pièces. Il fallait aussi réassembler les parties des pieds motorisés, pour cela j'ai tout simplement
utilisé un fer à souder pour plastique. En utilisant des chutes de plastiques que j'ai fondues, chaque partie ont pu se solidifier entre elles. Après un coup de ponçage final, j'ai
passé deux couches de peinture blanc brillant et le résultat était plus convaincant.
Maintenant que nous avions nos pieds imprimés, il fallait les motoriser. Dans un premier temps, il fallait axer la roue sur le moteur. Pour ce faire, j'ai utilisé un tour mécanique afin d'usiner
l'axe du moteur qui ne me paraissait pas assez lisse, je l'ai donc réduit en diamètre et creusé afin d'y visser une vis de blocage. Néanmoins creuser l'axe ne suffit pas à
la vis pour tenir, il faut fileter l'axe à l'aide de tarauds sans casser le filetage. Maintenant que l'axe était prêt, il fallait encastrer la roue sur l'axe, afin que l'axe et la roue ne
fassent qu'un. Pour cela j'ai usiné deux bagues de maintien de chaque côté de la roue. La réduction du diamètre de l'axe sur une certaine longueur sert de fin de course pour
la bague coté moteur, et la vis, elle, pour la bague coté extérieure.
J'ai pu enfin tester le moteur axé à la roue, à l'aide d'une batterie et d'un potentiomètre.
La méthode de fixation du moteur avait été réfléchie lors de l'impression 3D des pieds. Le but était de fixer grâce aux multiples trous taraudés sur le
moteur, une équerre en acier, qui elle-même serait fixée grâce aux 4 trous prévus lors de l'impression des pieds imprimés, visible sur la vue du dessus.
Ainsi nous
avons nos 3 pieds, un pied central avec deux roues folles et deux pieds latéraux motorisés. La fixation prévue entre les pieds et les jambes a aussi été pensée lors
de l'impression 3D, en effet nous avons laissé, au niveau de la chape des pieds, un vide dans la matière permettant d'y mettre un axe. Cet axe permet de lier une pièce en bois (représentée
ci-dessous, elle-même fixée à la jambe) et le pied.
R2D2 Electronique 1
Première année (2017-2018) :
L'aspect mécanique est plus ou moins terminé pour les pieds motorisés, il faut maintenant réussir à commander le R2D2. La partie étant
la motorisation du R2D2, elle était terminée, néanmoins les autres équipes avaient plus ou moins abandonné leur part. Nous voulions tout de même voir le robot fonctionner
sachant qu'il restait encore 1 mois avant la fin de l'année, j'ai décidé de tenter le coup. Le pilotage du R2D2 devait se faire par le biais d'un suiveur de ligne néanmoins je ne
trouvais pas ça très compliqué ni ambitieux, j'ai préféré me lancer vers un réel pilotage grâce à un échange entre deux appareils, émetteur-récepteur.
Pour cela je me suis beaucoup aidé d'Internet, et après de multiples recherches, Arduino m'a paru le plus faisable pour ma part. Ayant le matériel et certaines bases, j'ai décidé
de me lancer là-dessus. La carte Arduino ne pouvant pas délivrer énormément de puissance j'ai utilisé un amplificateur opérationnel qui va restituer aux bornes du moteur
une tension proportionnelle aux signaux PWM envoyés par la carte Arduino ; Cette tension variera de 0 à 24V. Le robot doit pouvoir avancer mais aussi reculer, il nous faut donc un pont en H qui
permettra au moteur de changer de sens en fonction du signal digital reçu (0 ou 1). Ayant un pont en H assez ancien il fallait que je le protège d'une surcharge avec des résistances.
La plaque Arduino se situe dans le corps du robot et la plaque Electronique se situe dans les cylindres, qui de base étaient seulement décoratifs, mais ont finalement un rôle important. La
vidéo YouTube suivante montre un montage et un code Arduino similaire à celui que j'ai. L'application utilisée "Arduino Robot Joystick" est très bien réalisée,
j'ai donc acheté cette app qui m'a permis de gagner énormément de temps sur le codage du pilotage et l'app fait office de télécommande.
J'ai dans un premier temps essayé cette application avec le module Bluetooth sur des diodes pour vérifier le bon fonctionnement du codage et ne pas être surpris par un quelconque dysfonctionnement lors du premier test sur les moteurs. Cela m'a permis de changer quelques réglages afin que les moteurs tournent dans le bon sens et ai finalement fixé les pieds motorisés et le pied avec les roues folles sur un semblant de R2D2 (planches en bois et seau).
R2D2 Mécanique 2
Seconde année (2018-2019):
Introduction :
Seconde année dans l'association et maintenant Vice-Président de l'Association, nous avons beaucoup de projets et d'envies, mais pour ma part
je veux absolument terminer le R2D2 qui est tout de même la mascotte de cette association. Cela nous permettrait de mettre en avant l'école lors des différentes visites et portes ouvertes.
Nous avons mis malheureusement beaucoup de temps a transposer tout l'électronique et la mécanique sur le vrai corps du R2D2 principalement à cause des jambes en polystyrène-bois (réalisées
quelques années auparavant par d'anciens élèves) qui étaient réellement de mauvaise qualité et assez fragiles.
Nous avons aussi eu des problèmes d'électronique,
certains composants ne marchaient plus, néanmoins après de multiples modifications et de recherches d'optimisations nous avons pu faire fonctionner le R2D2. En effet, chez moi l'utilisation de
petites batteries de 7Ah suffisaient au bon fonctionnement du robot en bois, néanmoins sur le réel robot avec le poids des nouvelles pièces, le robot n'arrivait pas à avancer convenablement.
J'ai donc opté pour une nouvelle batterie, une batterie de voiture, de 50Ah.
Mécanique :
Puis je me suis occupé de l'esthétique, la présentation des associations se
déroulait fin septembre et je voulais que le robot commence à ressembler au R2D2. Le dôme du R2D2 m'était fourni par un groupe qui s'en était occupé l'année précédente
et une plaque en métal, par le Président de l'Association, pour finir le corps du R2D2. J'ai utilisé plusieurs sangles à cliquet afin que la plaque obtienne au mieux la forme cylindrique
du corps du robot, puis j'ai riveté la plaque. Il ne me restait plus qu'à repeindre toutes les pièces, pieds y compris, certaines avaient reçu quelques dégâts dû
à des chocs.
Néanmoins à travers ces différents tests, j'ai pu voir que certains choix n'ont pas été les bons. Pour cette seconde année je voulais m'occuper
principalement du dôme, comme dans le film Star Wars, le R2D2 est connu pour ses cris et sa tête qui tourne. Je voulais donc m'occuper de la rotation de la tête et de l'audio afin qu'il se
rapproche le plus possible du réel R2D2. En parallèle de ce nouveau petit projet, nous utilisions le robot lors de portes ouvertes et visites et j'en suis venu à la conclusion qu'il fallait
changer le mécanisme des épaules qui ne supportait pas la puissance des moteurs. En effet, les jambes étaient fixées au corps grâce à une large tige filetée serrée
par deux écrous de chaque côté. Néanmoins lors d'une forte accélération, l'épaule se desserrait, sans arrêt, d'un quart de tour. Ceci n'était pas
viable et ce n'était pas mon seul problème. Comme on peut le voir sur la vidéo précédente, lorsque le robot a une vitesse assez basse les jambes tremblent beaucoup, et cela
est dû au choix de l'axe entre le pied et la jambe mais est aussi dû à la fragilité de la conception de la jambe.
De plus, le pied central ne suit pas aisément le mouvement
du robot, le problème vient du choix des roues folles, trop petites, j'ai préféré en mettre qu'une seule, mais plus grande, cela lui donne plus d'adhérence au sol lors d'un
virage sec.
J'ai donc décidé en décembre d'ajouter à mes nouvelles taches une modification des jambes et leurs fixations.
Dans un premier temps, nous allons étudier
le dôme et son audio puis dans un second temps nous analyserons le choix pour les jambes.
Premièrement, je me suis focalisé sur la motorisation du dôme qui permet sa rotation. Il
a fallu réfléchir à la connexion des conducteurs internes du dôme et les conducteurs du corps du robot. En effet, l'un étant une structure fixe(corps) et l'autre une structure
en mouvement (dôme), les conducteurs électriques sont contraints à une torsion voire un déchirement. Pour cela, j'ai utilisé un collecteur tournant électrique, qui permet
de transférer la puissance électrique d'un système fixe à un système rotatif sans risque. Mécaniquement, je suis parti sur le principe d'un micro-onde. J'ai utilisé
une plaque de PVC que j'ai découpée en 2 disques. L'un équivaut plus ou moins au diamètre du robot et le second réduit de 1 cm de diamètre. Le grand disque fera office
de socle, vissé sur le corps du R2D2, et le second disque, sera solidaire du moteur et donc suivra sa rotation. Ensuite, à l'aide d'une défonceuse, j'ai pu réaliser sur les deux disques
à partir de leur milieu, un fraisage. J'ai ensuite reporté ce fraisage sur le diamètre entier des deux disques, à la manière d'un compas. La butée étant réglée
sur la moitié de la profondeur totale des disques, cela m'a finalement donné une fente comme on peut le voir sur les images ci-dessous. J'ai ensuite pu supprimer le milieu des disques pour laisser
passer l'axe du moteur, afin de limiter les fixations j'ai décidé d'utiliser une scie-cloche d'un diamètre égal au diamètre du collecteur tournant, cela lui confère
par la même occasion un encastrement perpendiculaire et fiable. La réalisation d'une bague en PVC grâce au tour mécanique m'a permis d'y fixer des tiges filetées. En découpant
une tige filetée en plusieurs parties égales d'une longueur équivalente au rayon de la fente des disques soustrait au rayon de la bague, j'obtiens en ajoutant des roulements, un système
assistant la rotation du moteur sur le dôme entier. Il ne me reste plus qu'à relier la tête du dôme ainsi que le système réalisé, pour cela, j'ai décidé
de faire une colonne en PVC fixée sur le second disque tournant. La tête du dôme se posera sur cette colonne à l'aide d'une seconde bague, collée à l'intérieur
de la tête (voir ci-dessous), où le diamètre extérieur de cette bague correspond au diamètre intérieur de la colonne. Cela permet d'offrir une stabilité à
la tête, que l'on renforcera à l'aide de vis par l'extérieur. Maintenant que l'aspect mécanique est terminé, passons à la motorisation. J'ai choisi dans un premier temps
d'utiliser un moteur pas à pas, il est fortement recommandé lorsque l'on veut faire des mouvements très précis et ceux grâce à son principe de fonctionnement unique.
J'ai usiné un axe en cuivre afin que l'axe du moteur soit encastré à l'intérieur de celui-ci mais aussi qu'il soit solidaire du collecteur tournant. J'ai ensuite usiné et taraudé
3 trous sur la partie haute de l'axe que j'ai reporté sur la colonne en PVC, afin d'y mettre des vis de fixation (image centrale).
Nous avons finalement, notre moteur fixé à l'aide de
vis et d'entretoise au disque fixe servant de socle, l'axe du moteur est solidaire à l'axe usiné qui lui-même transmet sa rotation à la partie rotative du collecteur tournant et à
la colonne en PVC. La colonne est soutenue et guidée grâce au système de roulements qui affecte le disque sur lequel elle est fixée.
Comme cité plus haut, les jambes sont
assez fragiles et tremblent lors d'une basse vitesse. Vu la qualité de la conception des jambes j'ai décidé de les refaire. J'avais envisagé de la réaliser en 2 parties, l'une
en imprimante 3D qui servirait principalement de cache esthétique et l'autre en bois donnant de la rigidité à la pièce et permettant de travailler sur une matière fiable. Néanmoins,
n'ayant pas le matériel pour imprimer en 3D ni usiner en bois une si grande pièce, j'ai décidé de contacter des entreprises professionnelles. Après quelques semaines j'ai reçu
la validation de deux entreprises, qui me facturaient seulement le coût de fabrication, l'une spécialisé dans l'imprimante 3D thindustries et une autre dans la menuiserie avm-escaliers. J'ai pu réaliser à l'aide d'un de mes camarades les plans des jambes.
Après réception des pièces imprimées en 3D, l'entreprise de menuiserie a accepté de peindre les pièces confectionnées par leur part et les pièces imprimées.
J'ai ensuite réalisé les encadrés des panneaux leds du dôme, je pouvais commander directement les encadrés néanmoins j'avais l'outil afin de le réaliser moi-même, j'ai donc réalisé un plan puis usiné une pièce en plastique à l'aide d'une fraiseuse et réalisé mes 3 logic displays.
R2D2 Electronique 2
La rotation de la tête étant réglée, je voulais maintenant m'occuper de l'audio. J'ai donc réalisé plusieurs recherches et je suis tombé sur un forum américain qui m'a énormément plu. Des fans de Star Wars réalise lors propre R2D2 en taille réelle essayant de le rendre le plus réaliste possible. L'un deux a étudié durant quelques années l'aspect des leds et de l'audio au niveau de la tête du R2D2 et a finalement créé un système électronique, piloté grâce à son application, permettant de gérer les panneaux leds, des holo-lights, des moteurs internes et l'audio, à l'image même du vrai R2D2.
Presque chaque créateur de R2D2 utilise sa technologie. J'ai donc décidé de commander ce qu'il me fallait :
• Plaques PCB
• Tous les composants électroniques nécessaire
(leds, résistances, quartz, processeurs, ...)
• Arduino Micro
• MP3 Trigger (audio)
• Module et antenne Wifi
Après réception du matériel électronique, j'ai pu commencer à souder les composants sur mes plaques PCB afin de réaliser le montage entier du système électronique
du dôme.
Pour plus d’explications :
joymonkey
curiousmarc
L'achat d'un adaptateur a été primordial, afin de pouvoir téléverser
le code Arduino fourni, avec le tutorial, dans les processeurs des deux cartes électroniques construites ci-dessus. J'ai eu néanmoins quelques problèmes de compilations et de téléversement,
j'ai donc utilisé le forum et créé un post afin de recevoir de l'aide de ceux qui ont conçu ces tutoriels:
astromech
curiousmarc
Le système électronique fonctionne grâce à deux cerveaux, le Master et le Slave.
Le Master gère la communication entre le module Wifi et l'application du téléphone, mais aussi le MP3 trigger et le Slave. Le Slave lui gère les informations qu'il va recevoir du
Master par le biais du module Wifi, et va les envoyer à la Micro Arduino qui gère les panneaux leds.
Il ne me restait plus qu'à relier maintenant le téléphone au module Wifi, car jusqu'à présent le système fonctionnait néanmoins il ne communiquait pas avec l'application.
Pour cela il a fallu paramétrer le module Wifi puis modifier les paramètres et pare-feu de l'application.
Puis il ne me restait plus qu'à modifier les paramètres de l'application
R2 Touch app.
Cette application me permet ainsi en envoyant les informations au master et slave, de gérer en temps réel le son et l'affichage leds du dôme.
Maintenant que tout mon
système électronique fonctionnait, il ne me restait plus qu'à l'incorporer dans le R2D2. Néanmoins, l'enceinte utilisée n'était qu'une enceinte test. Celle que l'on
m'a fournie avait une batterie, or cela posait plusieurs problèmes. Avoir plusieurs batteries dans un robot porte vite a confusion car elle ne dépendra pas du bouton on/off du robot mais de sa
propre batterie, de plus, l'enceinte sera très difficile d'accès. Pour remédier à cela, j'ai décidé de démonter l'enceinte afin de la rendre dépendante
de la batterie du robot. Cela consiste tout simplement à supprimer sa batterie et de dessouder sur sa carte électronique, les câbles Power +/- de la batterie et d'en ressouder d'autres, qui
ressortiront de l'enceinte. Ils pourront ainsi se brancher aux bornes de la batterie du robot. Je n'aurais plus qu'à laisser définitivement l'interrupteur de l'enceinte sur ON, elle ne s'allumera
que lorsqu'elle reçoit du courant venant de la batterie du robot.
Je voulais rajouter une touche personnelle et un aspect plus adéquat au but de ce R2D2. C'est pour cela que j'ai acheté
un spot led et une caméra afin de remplacer les hololights qui sont supposés être situés sur deux emplacements de la tête. Le spot led ajoute une puissante lumière festive
et la caméra permet d'afficher sur un grand écran la vision du R2D2, puisqu'elle sera située parfaitement au centre de la tête.
R2D2 Mécanique 3
Troisième année (2019-2020) :
Mécanique :
Afin d'ajouter tous ces éléments électroniques, il me fallait modifier le dôme, percer et usiner différentes formes afin d'y fixer les différents panneaux
leds, caméra et spot. J'ai réalisé certains plans et trouvé certains sur le net afin de m’aiguiller sur la disposition des différents cadres leds et spots. J'ai, dans
un premier temps, retiré les plaques bleues en plastique thermoformable du dôme et noté leur disposition afin d'essayer de suivre une fois l'usinage fait, le même schéma. Dans
un second temps, à l'aide de scies cloches et d'une scie sauteuse j'ai pu usiner le dôme. Le fait d'usiner du métal assez épais et de plus sur une forme ronde ne m'a pas facilité
la tâche, j'ai eu beaucoup de mal à réaliser cette étape car je n'avais pas le droit à l'erreur. Comme on peut le voir sur les photos ci-dessous, la peinture du dôme était
fortement abîmée et a reçu beaucoup de chocs et de rayures. J'ai pour cela retiré toutes les couches de peintures afin de retrouver le matériau à nu, grâce à
un décapant assez puissant. J'ai ensuite pu enduire et poncer à l'eau le dôme, de multiples reprises, afin de retrouver une demi-sphère lisse. J'ai ensuite appliqué au pistolet
une peinture de sous couche afin d'uniformiser parfaitement la forme du dôme. Finalement, toujours au pistolet, j'ai appliqué deux couches d'une peinture grise mat.
Après avoir modifié
l'extérieur du dôme, il fallait mettre en place les fixations intérieures et donc savoir la disposition et le placement de chaque pièce, j'ai pour cela réalisé un plan
électronique.
La tête du robot est supposée être souvent en rotation, il faut donc une bonne fixation du système électronique interne, pour éviter tout risque
de dysfonctionnement ou court-circuit. J'ai pour cela utilisé le PVC, précédemment utilisé, pour créer un disque de soutien pour les PSI leds bloqués à l'aide
de vis. L'utilisation d'entretoises collées et d'une bande en plastique me permettent de fixer les 3 cadres leds. Les cartes électroniques, elles, sont vissées sur des plaques, elles-mêmes
collées à l'intérieur du dôme. Puis la fixation du spot led et de la caméra a été réalisée grâce à des plaques métalliques que
j'ai façonnées afin qu'elles suivent la forme du dôme. Finalement, le choix de l'installation de la carte Wifi a été pensé de sorte que la portée de l'antenne
soit maximale, pour cela, j'ai percé un trou au sommet du dôme afin que l'antenne soit fixée au sommet et de ce fait la carte Wifi se trouve installée.
J'ai ensuite réalisé
en impression 3D les 3 logics displays box des panneaux leds, ils permettent d'ajouter un aspect 3D au dôme et de mettre en avant les lumières.
Malheureusement lors de la mise en marche de la
rotation de la tête, j'ai pu apercevoir que le moteur pas à pas n'était pas assez puissant. Son couple était trop faible pour faire tourner le poids du dôme et ses pièces
électroniques. J'ai dû opter vers un autre moteur, celui-ci à courant continu et non pas à pas. Le couple nécessaire m'aurait obligé à acheter un moteur pas à
pas assez volumineux et cher. Le choix d'un moteur DC est certes moins propice au rôle mais le budget m'en contraint. J'ai donc dû usiner les trous de fixation du moteur afin qu'ils correspondent
aux vis de fixation prévues à leur effet. J'ai aussi réusiné le diamètre interne de l'axe en cuivre afin qu'il corresponde au nouvel axe du moteur DC. Ce moteur fonctionne
de 12 à 24V, or ayant un amplificateur de tension 24V, cela me permet de moins consommer et donc de conserver une bonne autonomie. Ce moteur sera commandé à l'aide de la même carte
Arduino qui commande les jambes et ainsi la même application Arduino Robot Joystick. La carte Arduino gérera le moteur par le biais d'un motor driver L298n.
J'ai finalement remonté tout
le système final dans le dôme. Afin de faire le câblage final, j'ai utilisé une pince de sertissage qui m'a permis de sertir les fils électriques et de les assembler dans un
connecteur électrique étanche. Cela permet de débrancher différentes parties du robot à l'aide d'un seul connecteur plutôt que de débrancher plusieurs fils électriques.
Cela me permet ainsi de retirer le dôme et le débrancher très facilement plutôt que de dévisser ou retirer plusieurs fils. J'ai finalement réalisé le montage final
dans le corps du R2D2, afin qu'il n'y ait aucun court-circuit et que le montage soit correct et propre.
Il ne me reste plus qu'à tester le système électronique dans le dôme.
Maintenant que tout fonctionne, il faut réaliser de nouvelles plaques bleues pour l'esthétique du dôme. Néanmoins n'ayant pas de plastique thermoformable, j'ai changé de matériau.
En effet, les plaques précédemment utilisées étaient fortement abîmées, j'ai donc préféré les refaire complètement. Je suis parti sur l'optique
de réaliser deux moules en polyester sur le dôme afin de récupérer la forme sphérique sur le dessus pour les plaques en forme de trapèze et sur le dessous pour les plaques
en forme rectangulaire. Grâce à ces moules j'ai ensuite pu réaliser les différentes pièces grâce à du gel coat, de la résine et de la fibre de verre. Après
avoir fini de mouler les pièces et les poncer, il ne me restait plus qu'à les finaliser esthétiquement, pour cela j'ai utilisé un enduit de finition et enfin une peinture de sous
couche au pistolet. Pour conclure, j'ai posé au pistolet deux couches de peinture bleue sur les pièces et deux couches de peinture gris métallisé sur le dôme après nettoyage
et ponçage de celui-ci.
Enfin, en utilisant du scotch double face j'ai pu fixer les plaques à leur emplacement tout en les chauffant pour qu'elles gardent la forme sphérique du dôme.